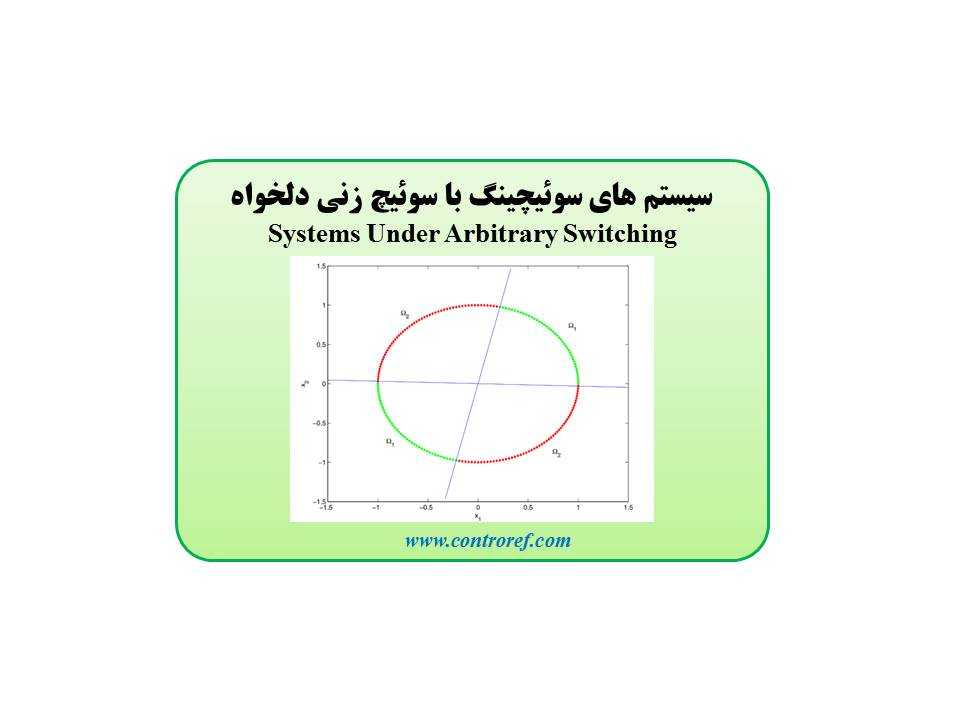
سیستم کلیدزن با کلیدزنی دلخواه (Systems under Arbitrary Switching) یکی از انواع سیستم های کلیدزن یا سوئیچینگ است که با تلفیق حالت های پیوسته و گسسته تبدیل دارای قابلیت مدل سازی، تحلیل و یا کنترل سیستم های پیچیده می باشد. سیستم کلیدزن تحت کلیدزنی دلخواه به این دلیل به این نام نامیده شده است در مورد سیگنال کلیدزنی آن اطلاعات خاصی وجود ندارد و یا اینکه سیگنال کلیدزنی آن به قدری پیچیده و دشوار و یا پرهزینه است که مدل نشده است. در این مجموعه آموزشی به معرفی سیستم کلیدزن تحت کلیدزنی دلخواه پرداخته و تئوری و تحلیل پایداری آن را مورد بررسی قرار خواهیم داد.
پیش نیاز این مجموعه: آشنایی با مفاهیم و اصطلاحات و تعاریف اولیه سیستم های سوئیچینگ است، مجموعه آموزشی مقدماتی بر سیستم های سوئیچینگ در همین پایگاه داده می تواند دانش مورد نیاز برای این مجموعه را فراهم سازد. پیش نیاز بعدی آشنایی با روابط نامساوی ماتریسی طی و نحوه حل آن ها در MATLAB می باشد که در این زمینه هم رجوع به مجموعه آموزشی نامساوی های ماتریسی خطی همین پایگاه داده توصیه می گردد.
برای دیدن جزئیات، بر روی هر جلسه کلیک کنید
جلسه اول: مقدمه ای بر سیستم های کلیدزن با کلیدزنی دلخواه
این جلسه شامل مفاهیم زیر است:
- معرفی سیستم کلیدزن تحت کلیدزنی دلخواه
- دلایل مدل سازی یک سیستم با این ساختار
- نحوه دسته بندی این کلاس در رده ی سیستم های کلیدزن وابسته به زمان و وابسته به حالت
مدت زمان: 43 دقیقه
محتویات آموزش : فایل تصویری 720p و پاورپوینت درس
جلسه دوم: پایداری سیستم کلیدزن دلخواه
این جلسه شامل موارد زیر است:
- مفاهیم پایداری سیستم کلیدزن دلخواه
- پایداری در مفهوم لیاپانوف
- اثبات پایداری با تابع لیاپانوف مشترک (Common Quadratic Lyapunov Function)
- بیان شرط لازم پایداری
- بیان شروط به فرم LMI و شرح اثبات
مدت زمان: 51 دقیقه
محتویات آموزش : فایل تصویری 720p و پاورپوینت درس
جلسه سوم ادامه بحث پایداری سیستم های کلیدزن دلخواه
این جلسه شامل:
- ادامه بحث پایداری با تابع لیاپانوف چندگانه (Multiple Quadratic Lyapunov Function)
- بیان شرط کافی پایداری
- بیان شرط لازم و کافی پایداری
- بدست آوردن LMI های مربوط به شروط پایداری
- کدنویسی LMI های پایداری در مفهوم لیاپانوف مشترک و چندگانه با MATLAB
- کدنویسی جهت ترسیم سیگنال کلیدزنی دلخواه با MATLAB
- کدنویسی بدست آوردن پاسخ زمانی سیستم کلیدزن تحت کلیدزنی دلخواه و مشاهده نحوه کلیدزنی حالت ها با MATLAB
مدت زمان: 56 دقیقه
محتویات آموزش : فایل تصویری 720p، پاورپورینت درس، 4 فایل کدنویسی در MATLAB و مراجع
مریم
سلام ممنون از آموزش خوبتون.
خانوم دکتر برای سیستم های سوئیچینگ با زمان سکون، واحد زمان که از فرمول ها بدست میاد چیه؟ مثلا در کتاب time dependent switched disceret time linear systems، وقتی DT را حساب کرده نگفته برحسب ثانیس یا میلی ثانیه یا …، واحد را چی باید در شبیه سازیا در نظر بگیریم؟
دکتر فرجی
سلام
خوب احتمالا منظور همون یک ثانیه هست.
بسته به سیستمی که دارید با یم ثانیه و دهم ثانیه امتحان کنید
فرزاد
سلام ایا میشه توی روش یالمیپ از فانشن اینورس استفاده کرد؟ مثلا توی یکی از ماتریس هام p هست و معکوس p برای تعریف معکوس p ارور میده
دکتر فرجی
سلام
نه متاسفانه جون وجود اینورس معادلات رو از حالت خطی در می آره. یاید از تغییر متغیر براش استفاده بکنید.
فرزاد
خوب دقیقا همین کارو کردم یعنی (inv(p رو گرفتم یه متغیر دیگه مثلا r و توی معادلاتم به جای (inv(p
،r قرار دادم و دوباره ارور داد
به نظرتون مشکل کجاست؟
دکتر فرجی
خی این کار احتمالا جواب نمی ده چون در این صورت P , invp رو دو تا متغیر جدا در نظر می گیره.
نحوه برخورد با این جور مساپل رو می تونید تو تپوری های مبتنی بر LMI تو مقالات یا کتاب های مربوطه ببینید.
همجنین توصیه می کنم یا به آموزش LMI دکتر چوادی توی همین سایت مراجعه کنید یا اینکه زیر پست مربوط به اون آموزش کامنت بذارید تا رفرنس مناسبی براتون معرفی کنن.
مریم
سلام، ممنون از آموزش خوبتون.
قضایایی که گفتین، در حالتی که سیستم دارای ورودی باشه هم صادقه؟ اگر نیست چطوری میتونم پایداری سیستم سوئیچینگ با در نظر گرفتن رابطه x(k+1) = Ax(k) + Bu(k) را اثبات کنم؟
دکتر فرجی
سلام
باید وروردی کنترلی رو اعمال کنید و سیستم رو به صورت حلقه بسته بازنویسی کنید و تحلیل پایداری انجام بدید.
مریم
یعنی از همین قضیه ها استفاده کنم فقط بجای A ی حلقه باز ، ماتریس A حلقه بستشو بذارم ؟
دکتر فرجی
بله همینطوره
اگر هدف طراحی خود بهره کنترلی باشه هم باید به همین شیوه عمل کنید که مشابه طراجی برای سیستم های معمولی هستش
مریم
ممنون از پاسخ گوییتون 🙏
امیر
سلام و عرض ادب
میخواستم بدونم آیا این مجموعه به کسی که قصد داره توی زمینه سیستم های سوئیچینگ مقید(وابسته به حالت) کار کنه مفید هست یا خیر ؟
ممنون.
دکتر فرجی
سلام
می شه که گفت که لازمه اما کافی نیست.
توصیه می کنم پیش نمایش ها رو مشاهده بفرمایید
امیر
ممنون از شما
علی
مقالات شما رو با چه کلید واژه هایی سرچ کنم؟
دکتر فرجی
https://scholar.google.com/citations?user=1PK7IocAAAAJ&hl=en