
کنترل سیستمهای تاخیردار با استفاده از LMI
تاخیر زمانی در بسیاری از سیستمها باعث کاهش عملکرد و یا حتی باعث ناپایداری میشود و بنابراین باید در مدل درنظر
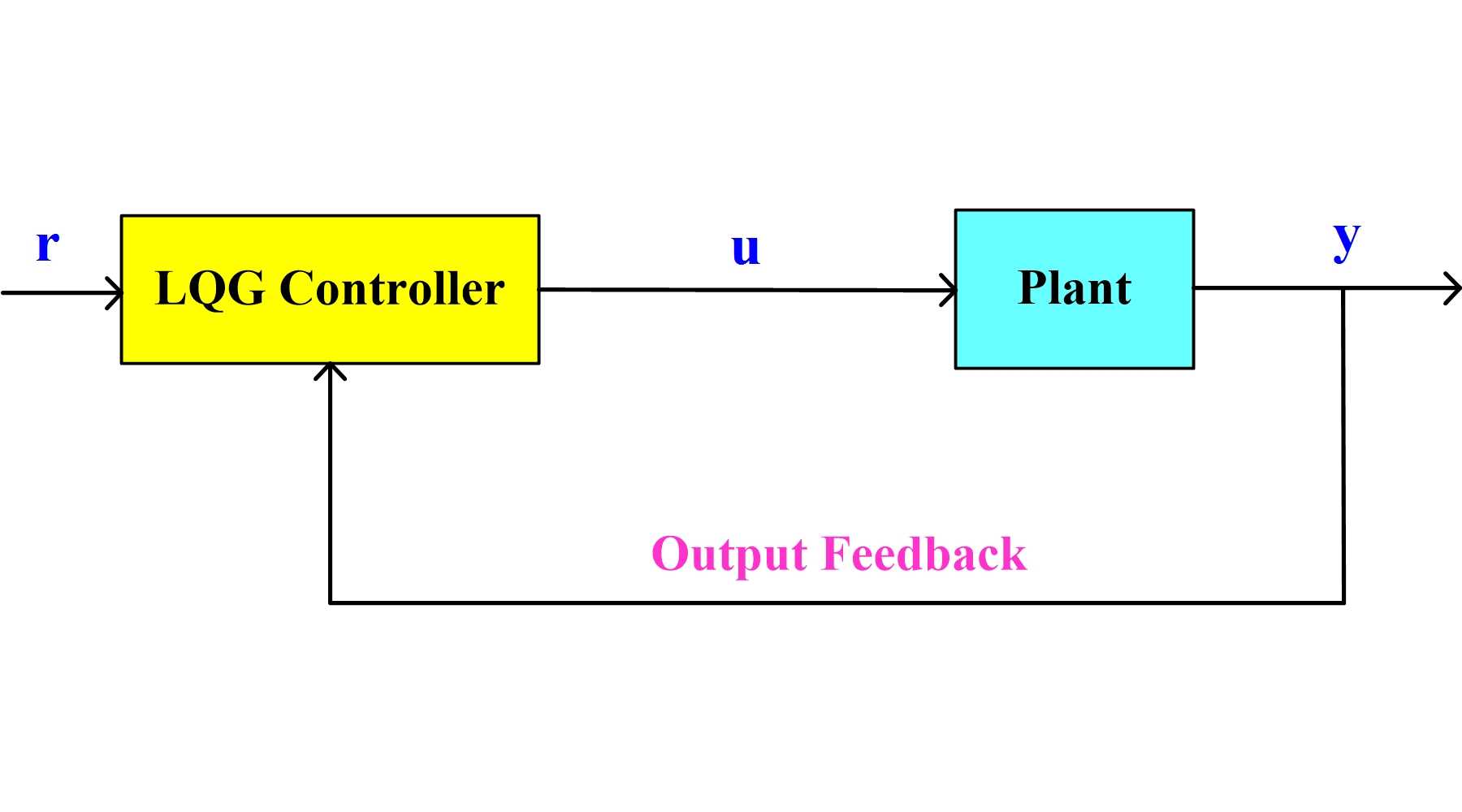
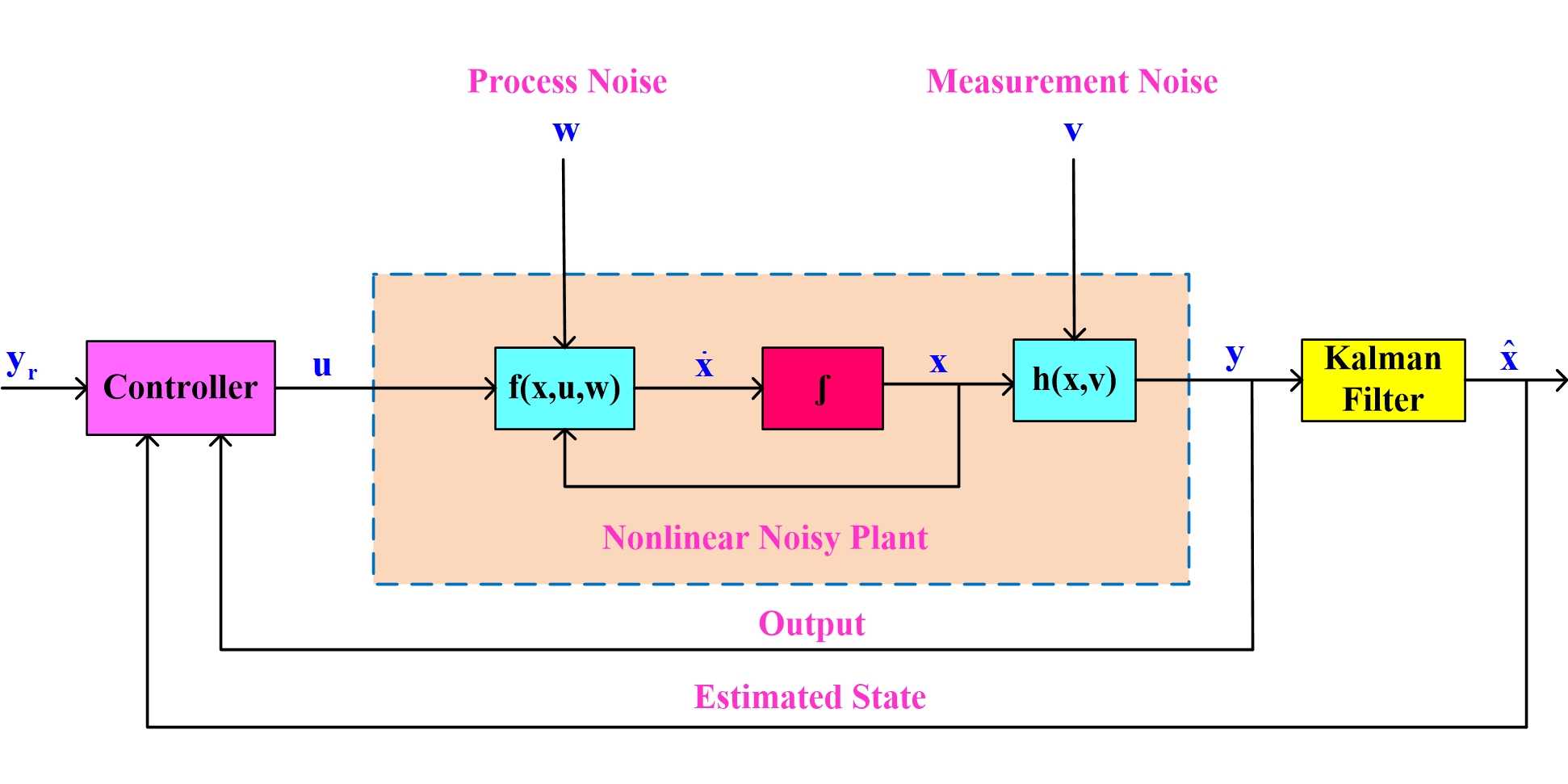
کنترل فیدبک خروجی بهینه LQG
در واقع LQG از یک کنترلکننده بهینه LQR و یک فیلتر کالمن تشکیل شده است که فیلتر کالمن از خروجیهای سیستم تخمین حال�
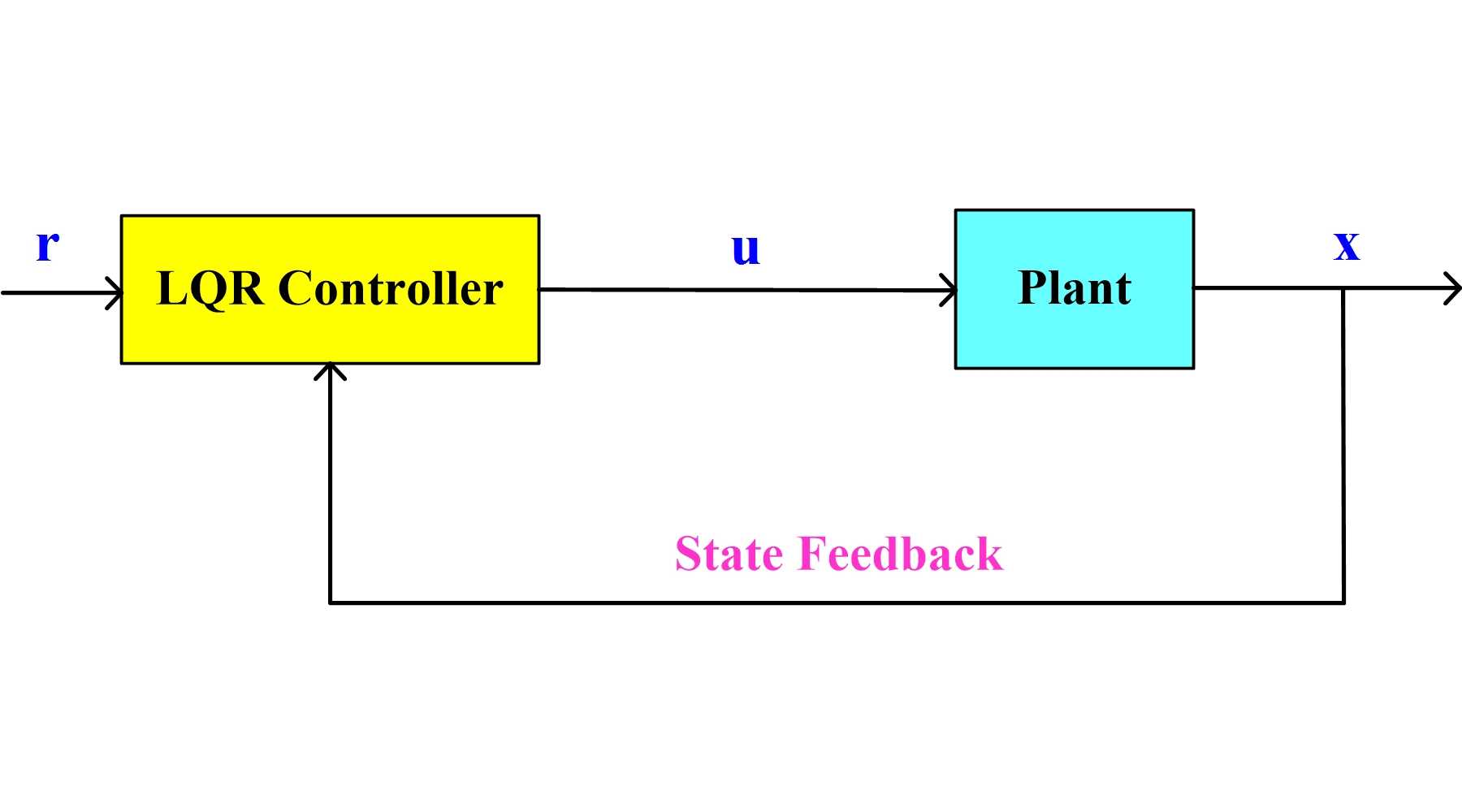
کنترل فیدبک حالت بهینه LQR
کنترل بهینه (Optimal Control) به عنوان یکی از روشهای مدرن کنترلی، جایگاه ویژهای در بحث سیستمهای کنترل دارد. یکی از رو

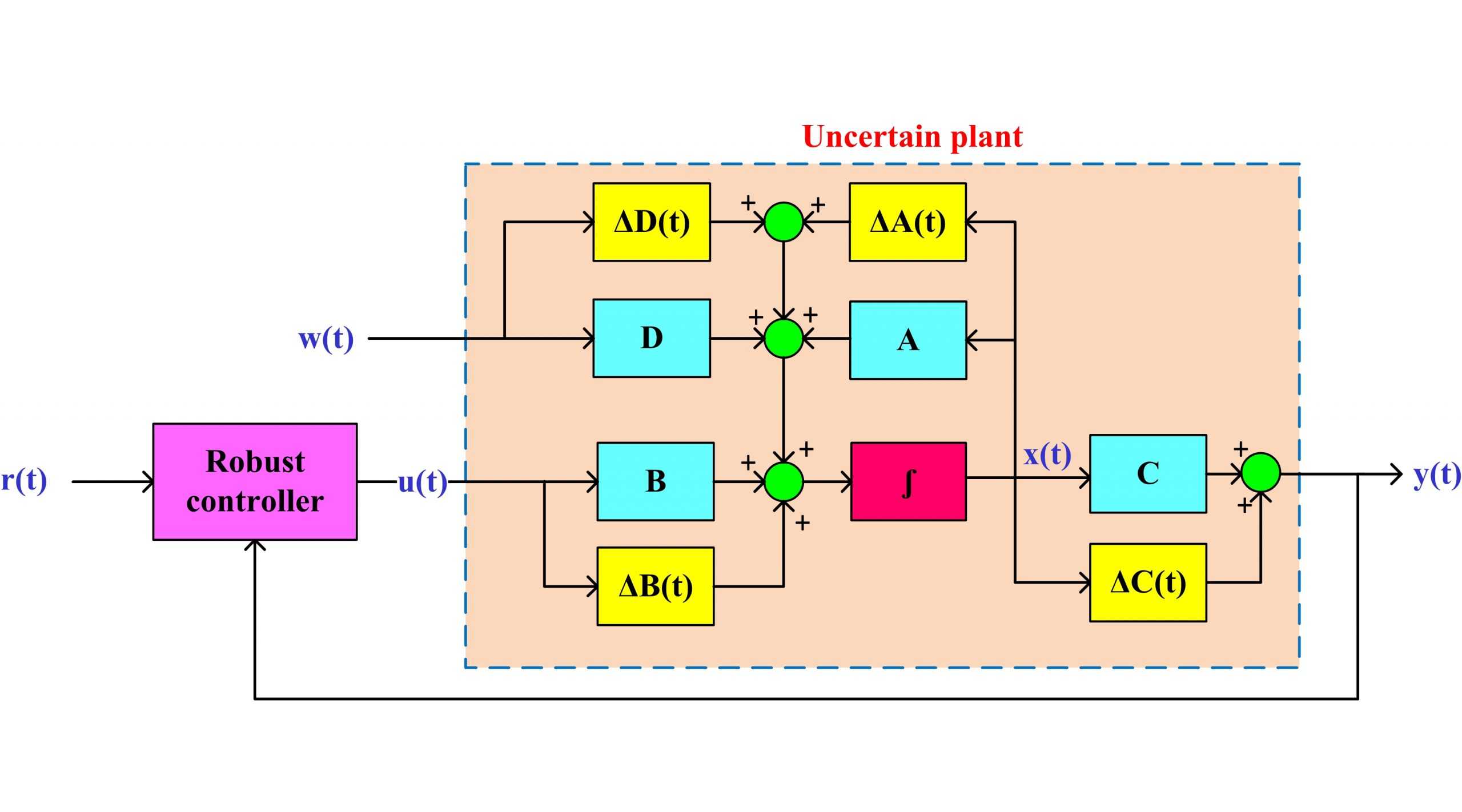
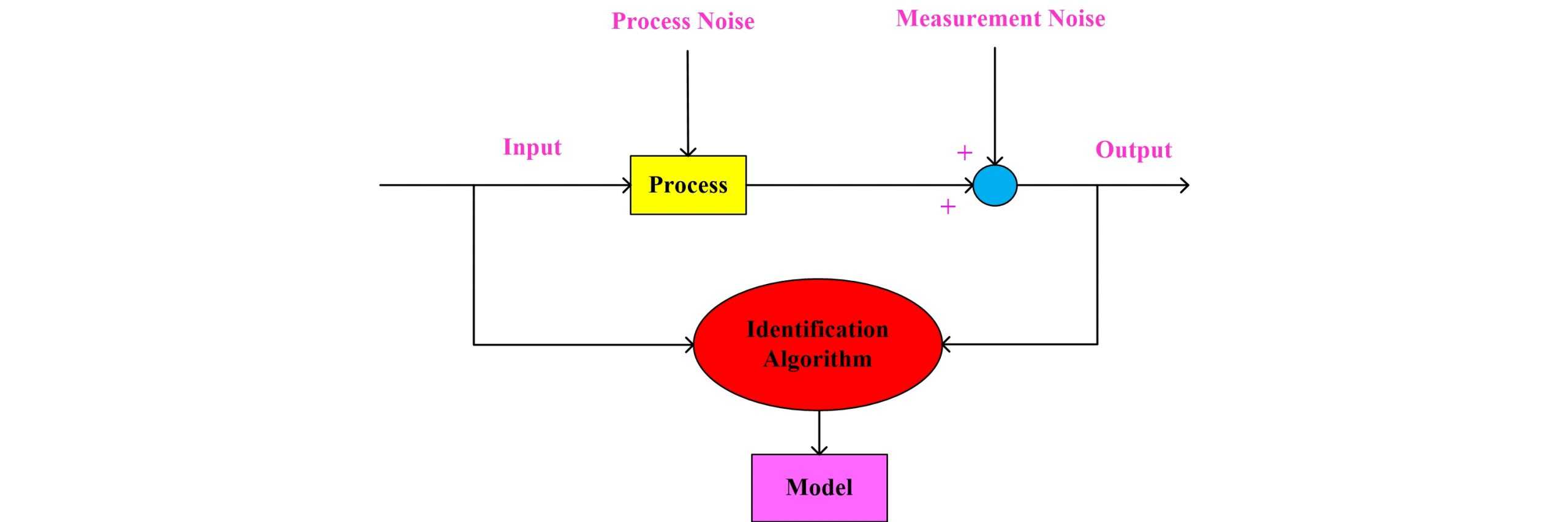
کنترل مقاوم فیدبک خروجی سیستمهای خطی تحت نامعینیهای پارامتری و اغتشاش با استفاده از نامساویهای ماتریسی خطی (LMI)
در این سری جلسات قرار است همه این عوامل یکجا در نظر گرفته شده و سیستمهای خطی دارای نامعینی و اغتشاش تنها با فید�
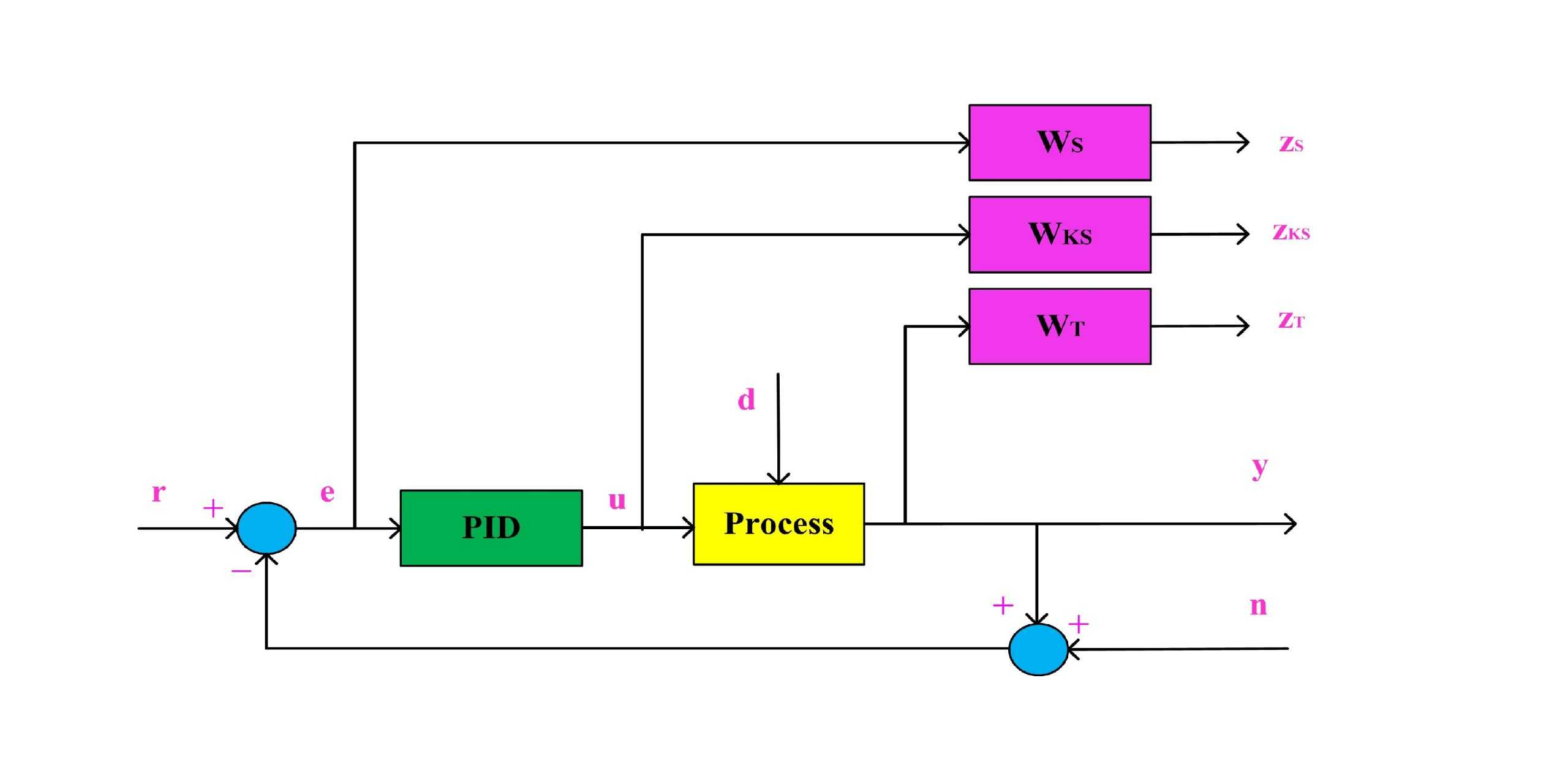
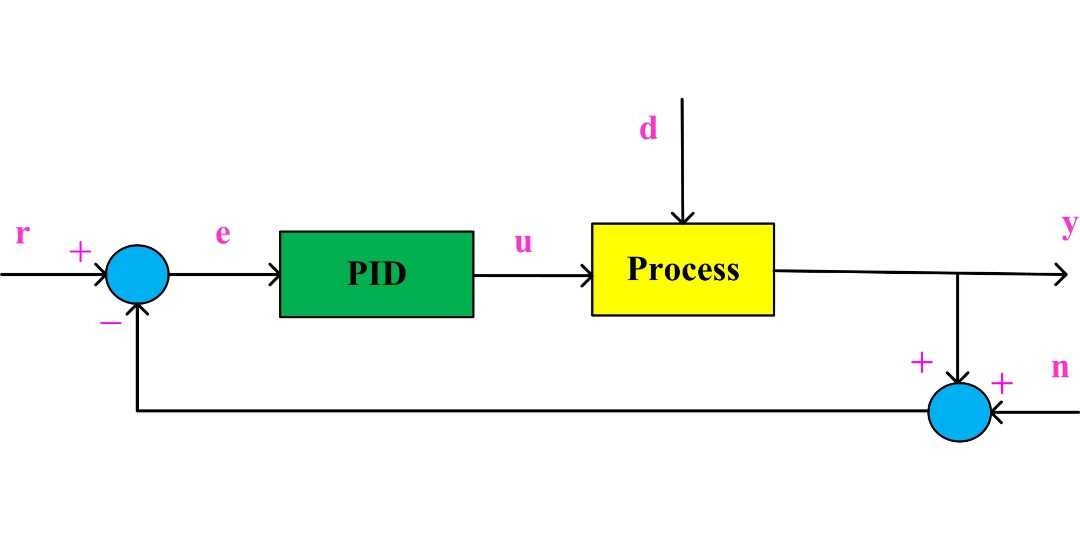
کنترل مقاوم ∞H فیدبک خروجی سیستمهای خطی تحت اغتشاش با استفاده از نامساویهای ماتریسی خطی (LMI)
در سری فیلمهای حاضر دقیقا این مشکل مدنظر قرار گرفته و هدف طراحی یک کنترلکننده مقاوم برای سیستمهای خطی تحت تا�
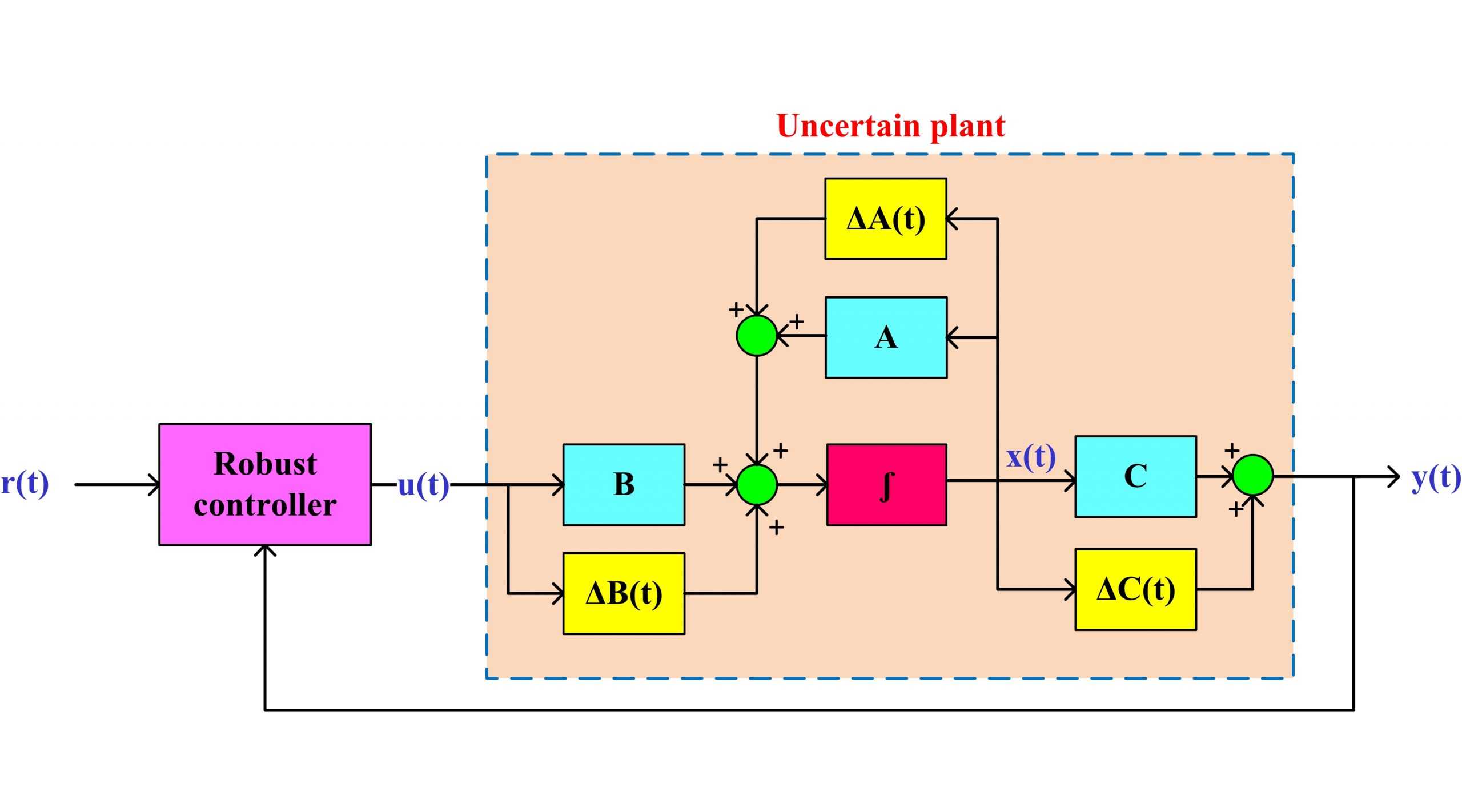
کنترل مقاوم فیدبک خروجی سیستمهای خطی تحت نامعینی پارامتری با استفاده از نامساویهای ماتریسی خطی (LMI)
یک کنترل کننده مقاوم دینامیک برای سیستمهای خطی تحت نامعینی پارامتری به گونهای طراحی میشود که فقط از خروجی
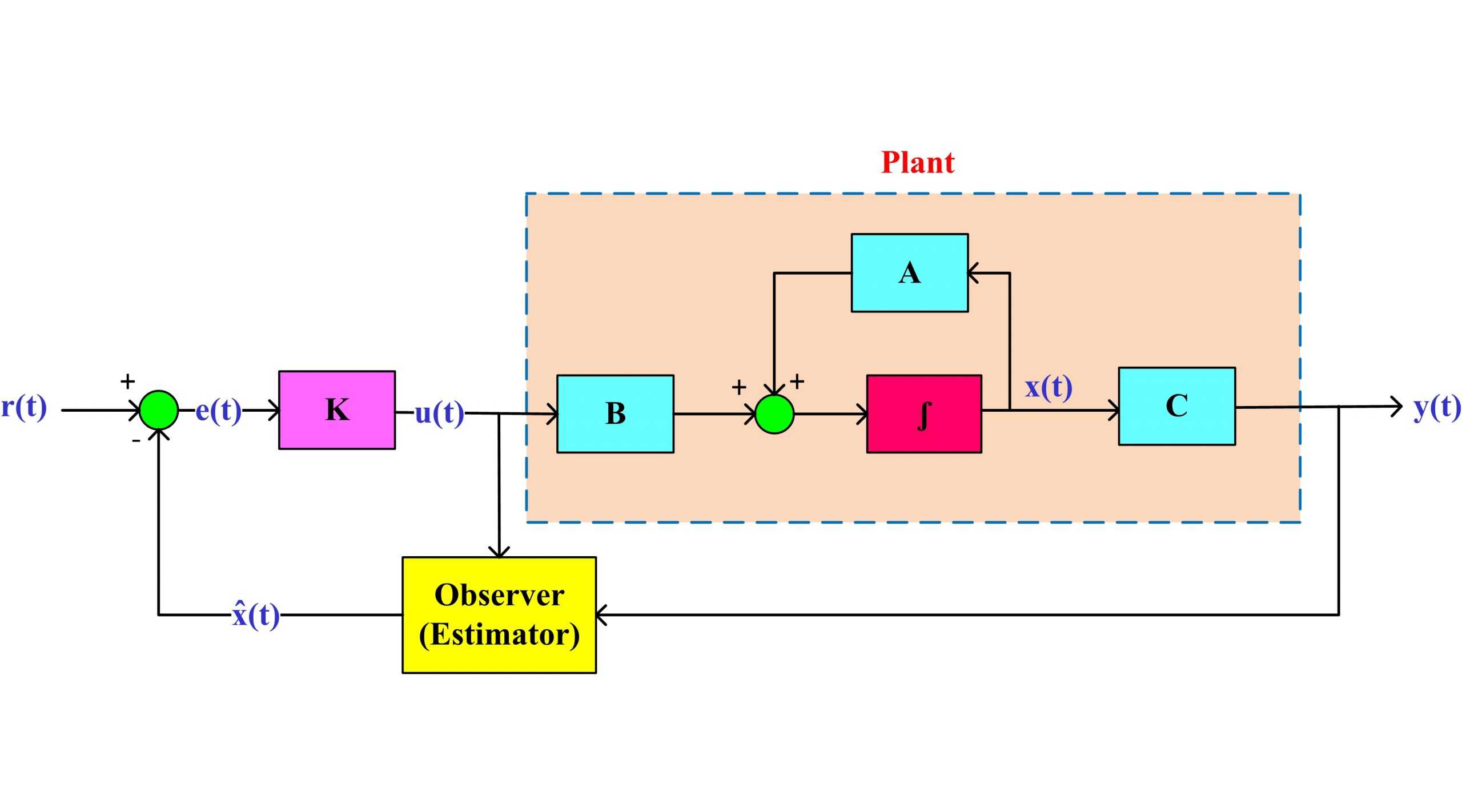
کنترل فیدبک خروجی سیستمهای خطی از طریق رویتگر (تخمینگر) با استفاده از نامساویهای ماتریسی خطی (LMI)
همونطور که میدانید در سیستمهایی که با کنترل کننده فیدبک حالت پایدارسازی انجام میشود، باید تمامی حالتها انداز�
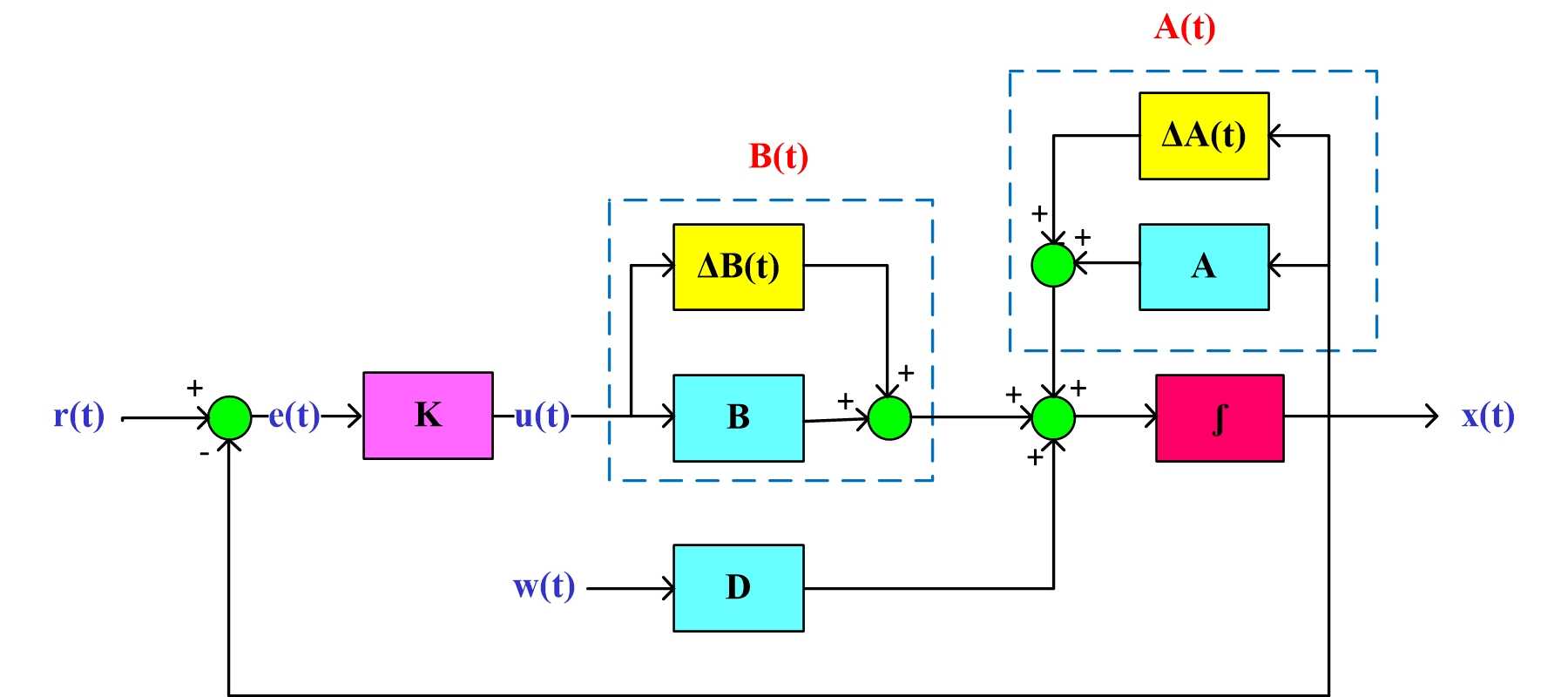
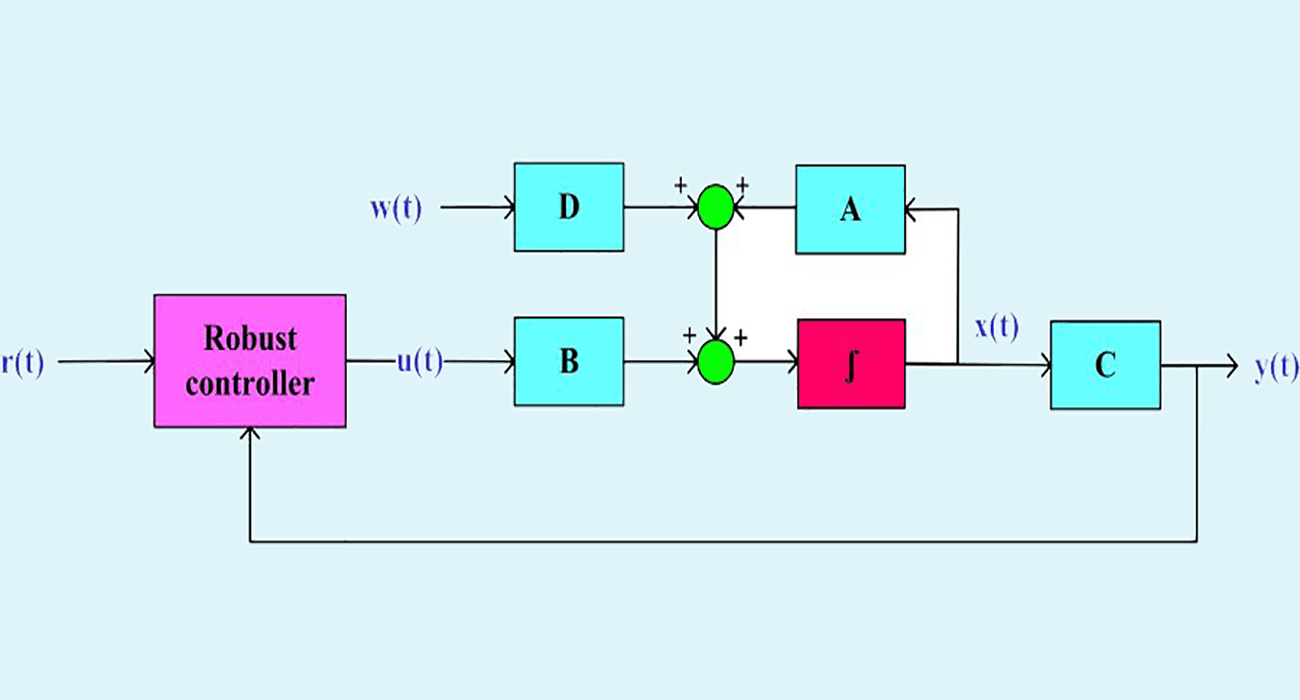
کنترل مقاوم سیستمهای خطی تحت نامعینیهای پارامتری و اغتشاش با استفاده از نامساویهای ماتریسی خطی (LMI)
در این سری جلسات برای این سیستمها که کلی تر هم هستند، LMI های مورد نیاز برای بدست آوردن بهره کنترل کننده فیدبک حا
- 1
- 2