ارتباط لب ویو (LabVIEW) و آردوینو (Arduino)
در این دوره ارتباط لب ویو (LabVIEW) و آردوینو (Arduino) آموزش داده میشود. با اتصال لب ویو به برد آردوینو میتوان یک کا�

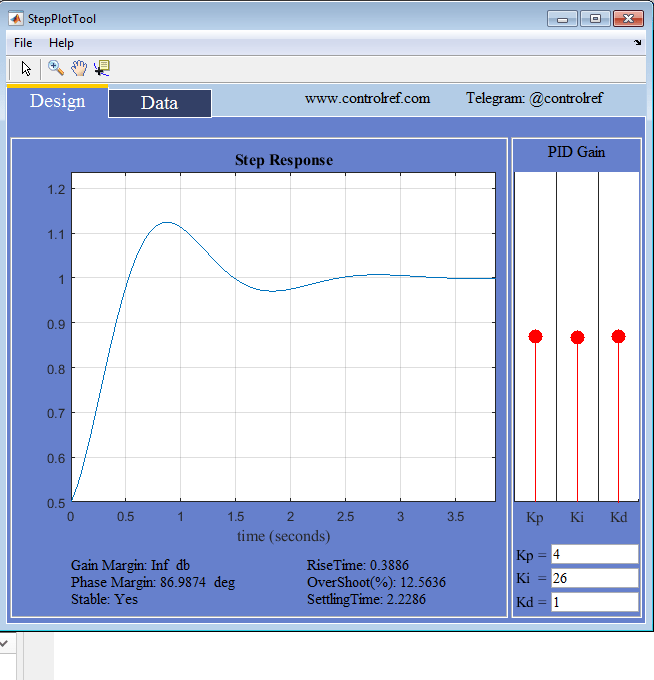
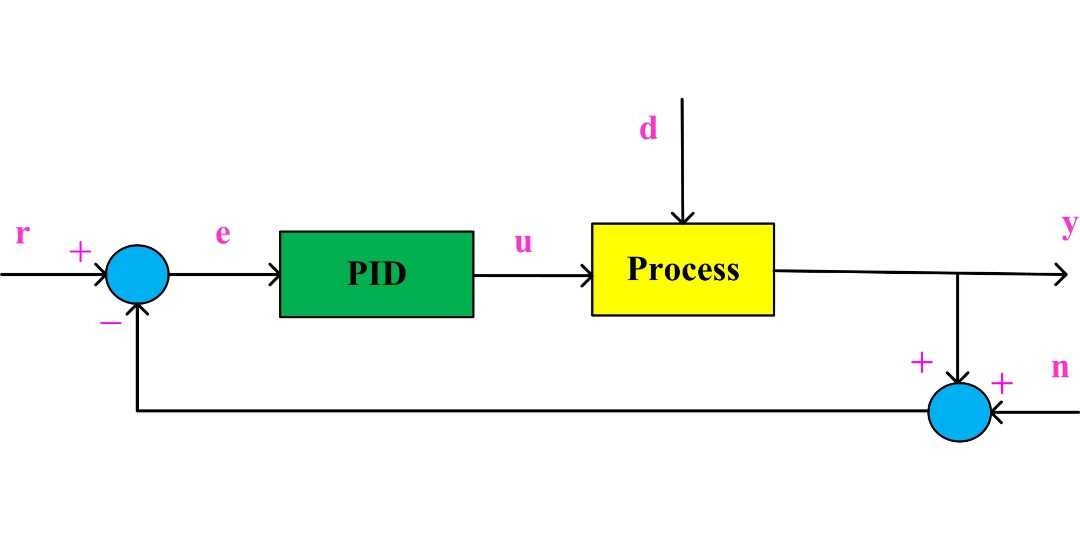
طراحی کنترل کننده PID با استفاده از gui
در اينجا، يک واسط گرافيکي و يا guiيي در متلب توليد شده که با استفاده از آن براحتي مي توان يک کنترل کننده PID براي ي�
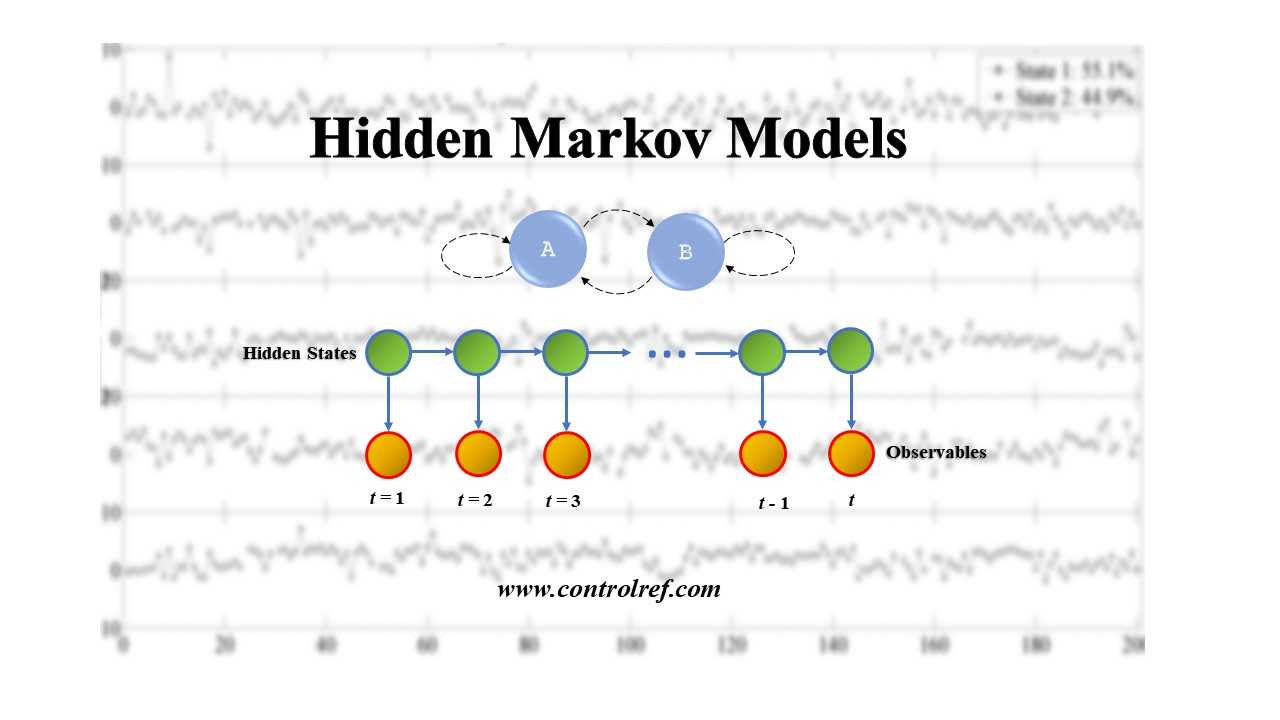
مدل های مارکوف مخفی (HMMs)
در مدلهای مارکوف معمولی (Markov models)، حالت ها (States) به طور مستقیم قابل مشاهده هستند (Observable) و یک زنجیره یا فرآیند ما�
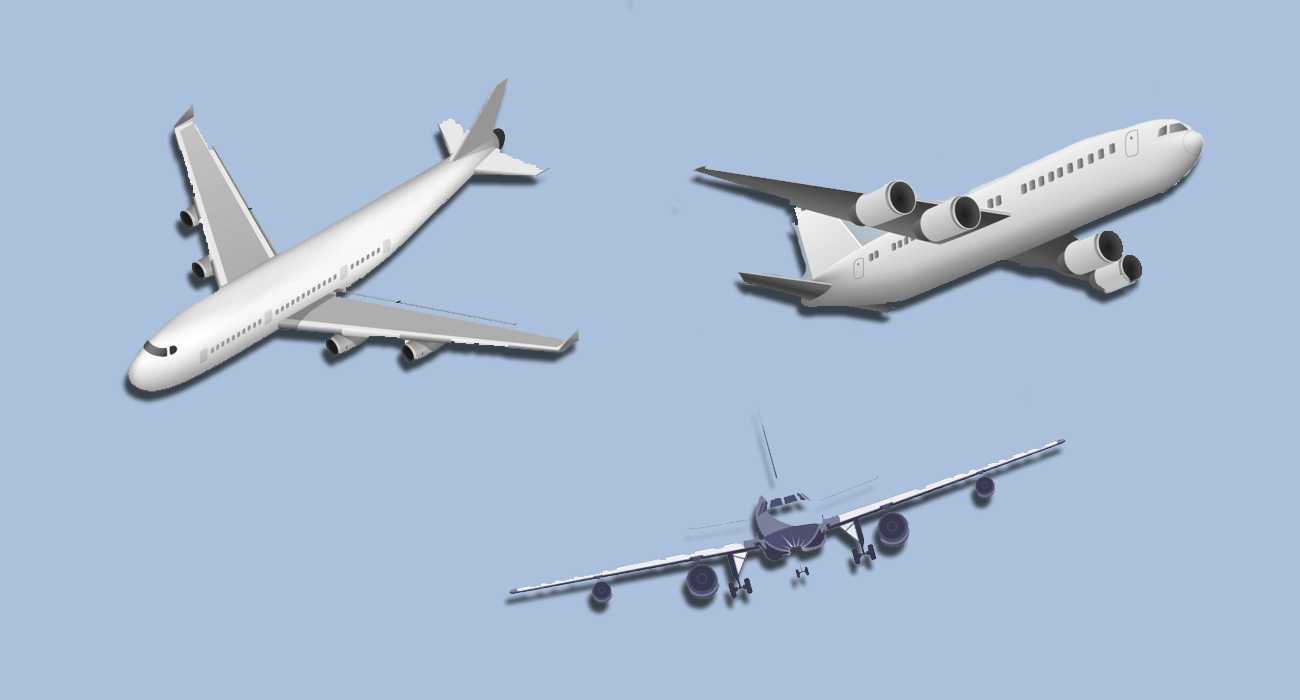
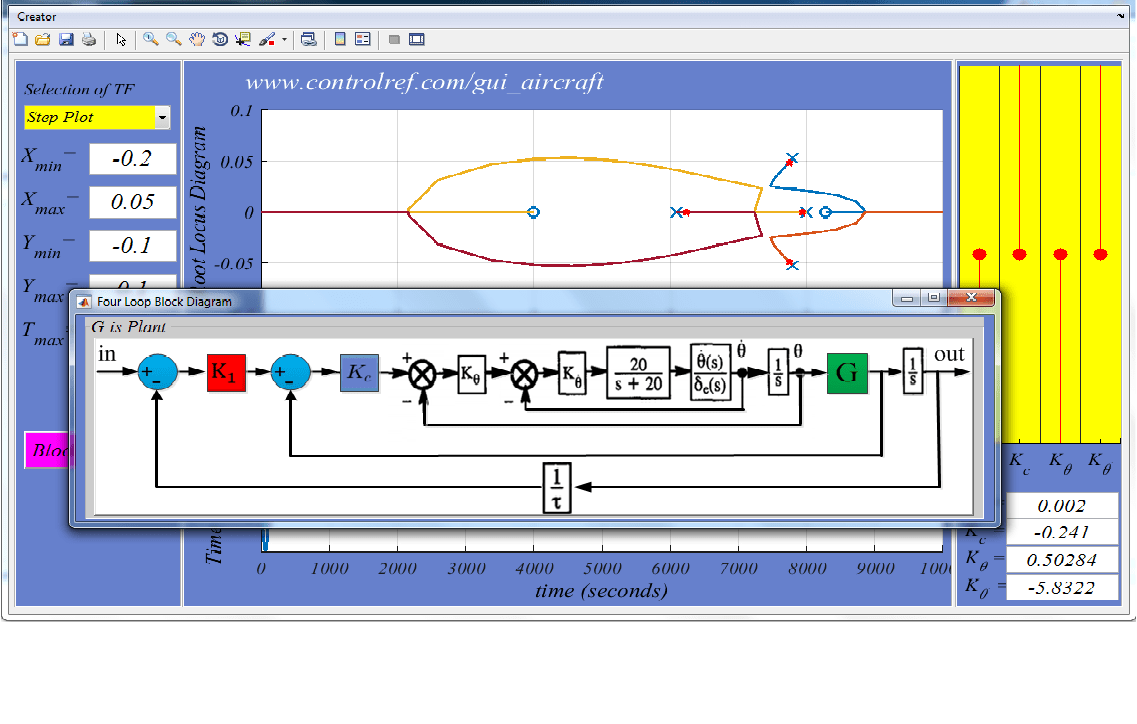
پایداری و کنترل هواپیما
پایداری هواپیما شامل دو بخش پایداری استاتیکی و دینامیکی بوده و به ترتیب عبارت است از تمایل ذاتی هواپیما در مخا
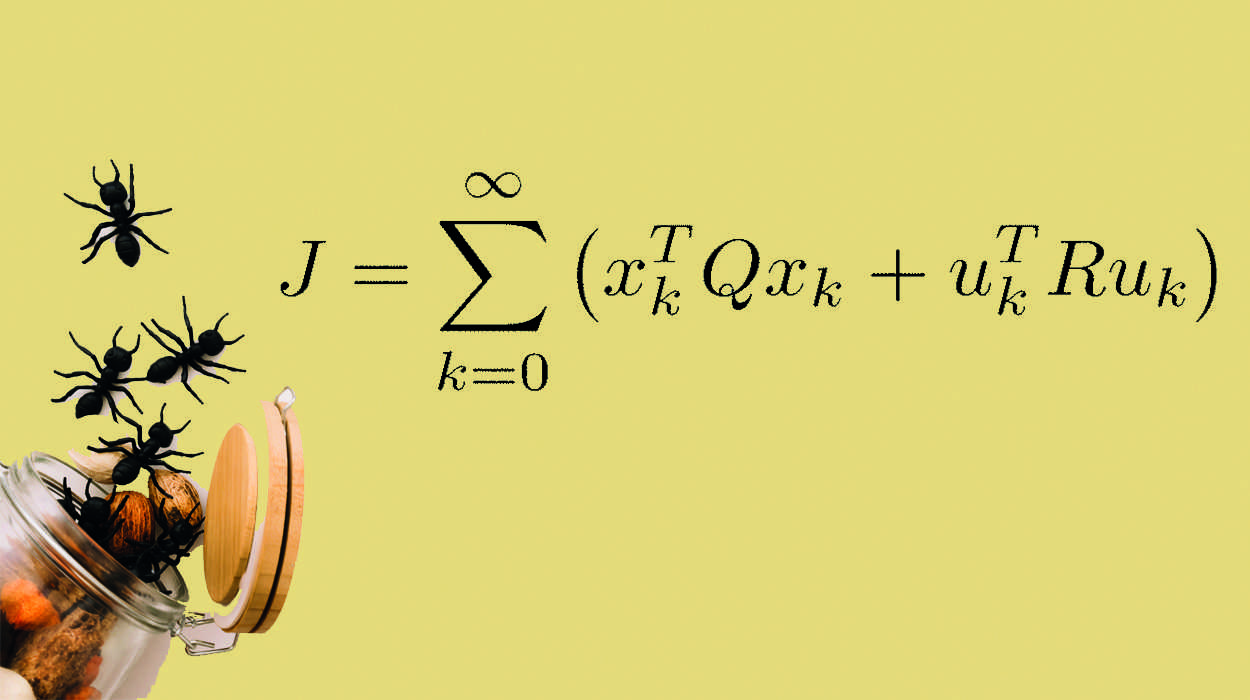
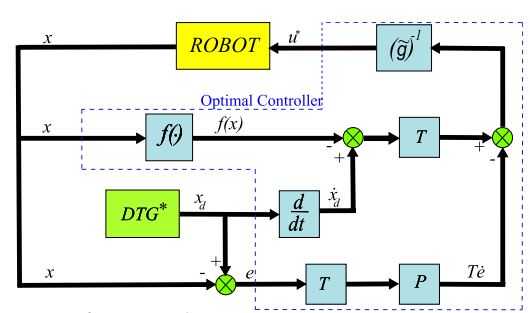
آموزش کنترل بهینه (Optimal Control) | شبیه سازی و آموزش تصویری کنترل بهینه
کنترل بهینه دارای تعارف جدید و روش های ریاضی پیچیده ای برای حل مسائل است. مرجع مهندسی کنترل سری آموزش بهینه را �

مدلسازی و شبیه سازی 6 درجه آزادی هواپیما
این پست مربوط به جلسات مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما است. اصطلاح انگلیسی این عبارت 6DOF A
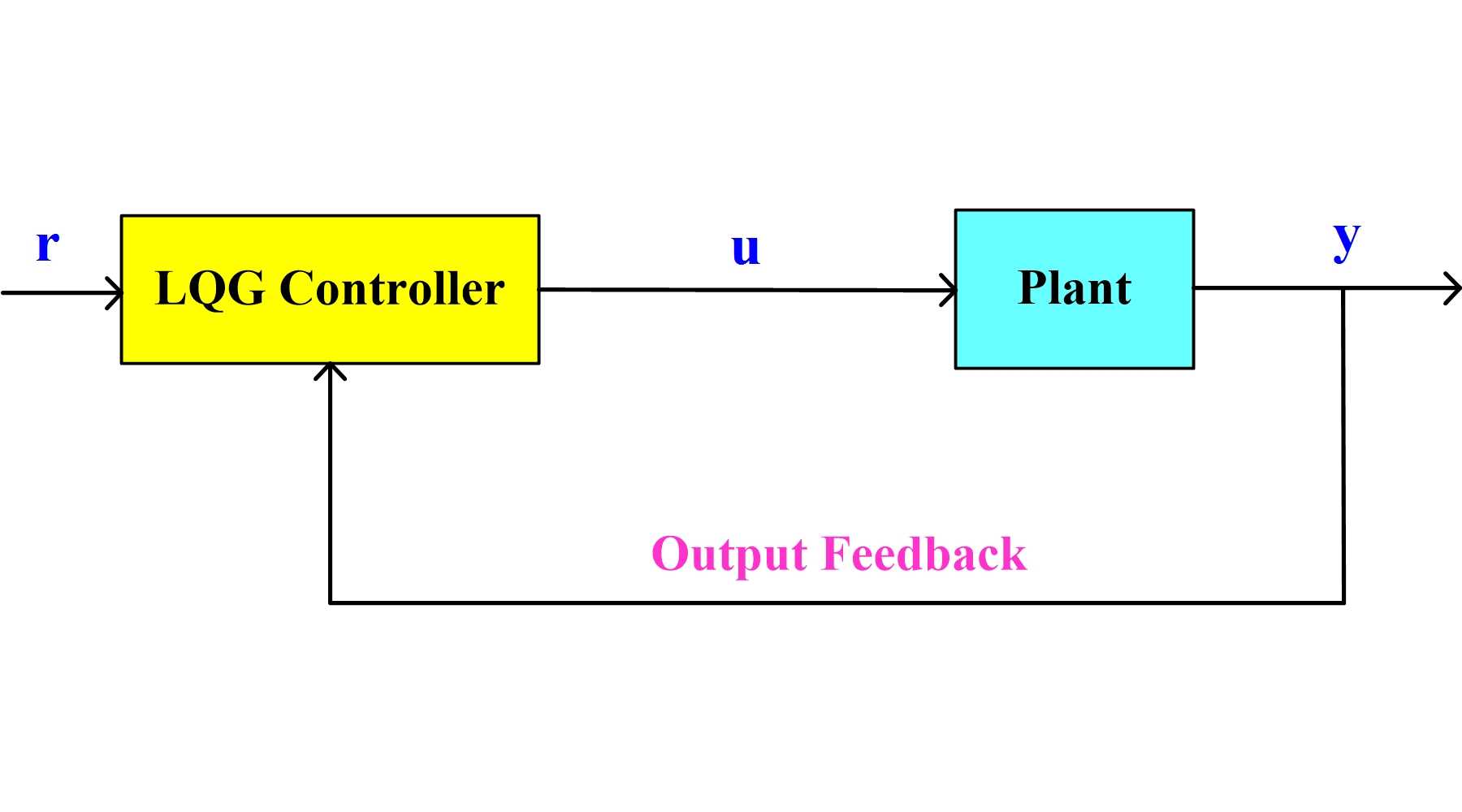
کنترل فیدبک خروجی بهینه LQG
در واقع LQG از یک کنترلکننده بهینه LQR و یک فیلتر کالمن تشکیل شده است که فیلتر کالمن از خروجیهای سیستم تخمین حال�
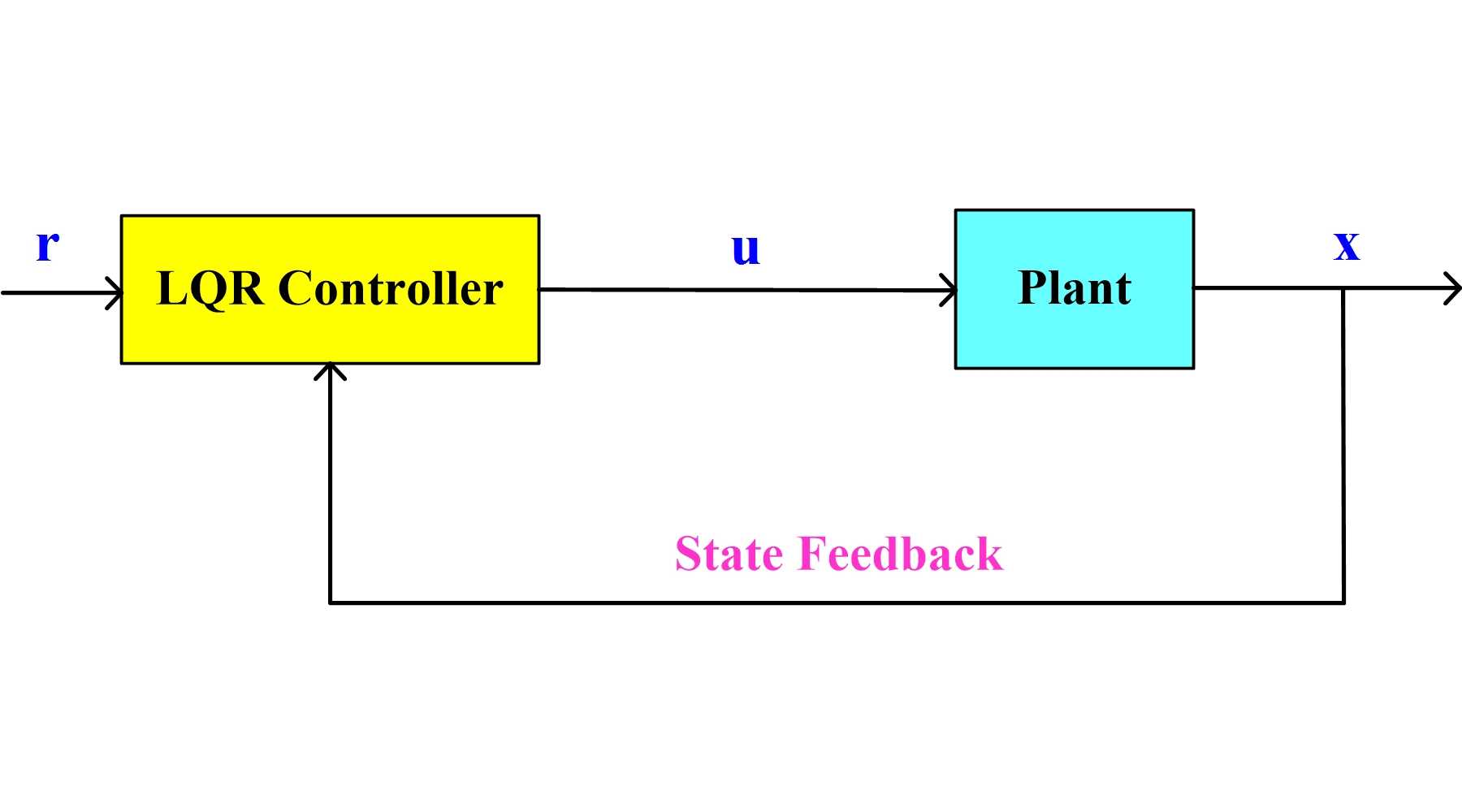
کنترل فیدبک حالت بهینه LQR
کنترل بهینه (Optimal Control) به عنوان یکی از روشهای مدرن کنترلی، جایگاه ویژهای در بحث سیستمهای کنترل دارد. یکی از رو