مد لغزشی یکی از روش های کنترلی مقاوم می باشد. این کنترل کننده در برابر اغتشاشات و تغییر پارامتر ها و همچنین نویزهای مزاحم کاملا مقاوم می باشد. دلیل کارایی بالای این روش سادگی طراحی و پیاده سازی آن در عمل می باشد. این روش به طور گسترده در سیستم های گونانون غیر خطی مورد استفاده قرار می گیرید….
جزوه حاضر نتیجه تجربه یک ساله ام در زمینه پایان نامه و همچنین پروژه های زیادی هست که انجام دادم. این یک جزوه کاملا کاربردی می باشد و برای تمامی رشته های فنی می تواند براحتی مورد استفاده قرار گیرد. در این جزوه ابتدا در مورد مفهوم مد لغزشی توضیح داده شده سپس الگوریتم طراحی به صورت کاملا خلاصه عنوان شده است سپس این الگوریتم را در یک مثال پیاده نموده ایم و پس از آن یک مثال شبیه سازی شده همراه با کدهای MATLAB آورده شده است. لازم به ذکر است که خط به خط برنامه در این جزوه توضیح داده شده است بنابراین در هر سطحی که باشید به راحتی می توانید پس از خواندن این جزوه برای سیستمهای گوناگون کنترل کننده مد لغزشی را طراحی و شبیه سازی کنید.
لازم به ذکره که مجموعه های بسیار کامل تر دیگه ای به صورت فیلم آموزشی در سایت قرار داده شده است. اگر کسی می خواد مد لغزشی رو به صورت اصولی یاد بگیره، ابتدا “فیلم آموزش مد لغزشی طبق کتاب اسلاتین” رو از اینجا نگاه کنه و بعدش میتونه حتی فیلم آموزش انواع مد لغزشی های پیشرفته رو هم که ما برای اولین بار در سایت مرجع مهندسی کنترل قرار دادیم از این اینجا مشهاده کنه. همچنین فیلم آموزش مد لغزشی فازی (Fuzzy Sliding Mode) رو میتونید از این اینجا مشاهده کنید.
مطالب این جزوه عبارتند از:
1 فلسفه استفاده از کنترلر مد لغزشی
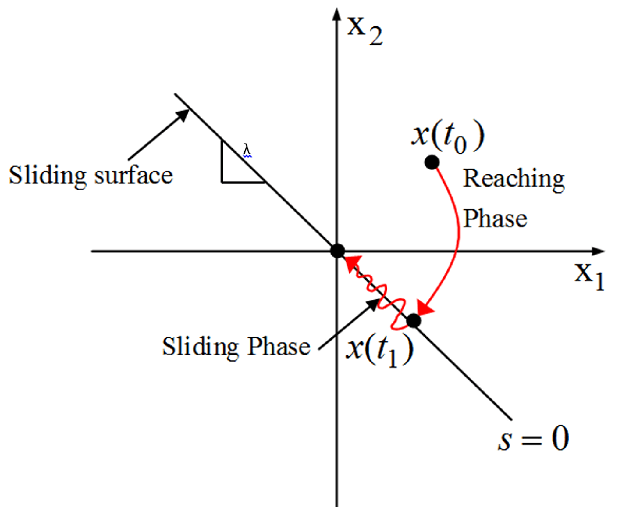
2 بررسی کنترلر مد لغزشی از نظر هندسی
3 مشکلات پدیده چترینگ
4 راه حل کاهش پدیده چترینگ
5 روند طراحی کنترل کننده مدلغزشی
5-1 گام اول: تعریف سطح سوئیچینگ
5-2 گام دوم: بدست آوردن انرژی کنترلی معادل
5-3 گام سوم: بدست آوردن انرژی کنترلی کل
6 مثال ها

ابراهیمی
برادر محترم من جمعه پنجم مرداد از سایت شما چند مبحث خریداری کردم توی کانال هم بهتون پیام دادم اما لینک دانلود برای من فرستاده نشد. در صورتیکه شما گفته بودید بلافاصله لینک دنلود به ایمیلتون ارسال می شه ؟ علت این کارتون چیه؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟
مدیر سایت
@ابراهیمی,
سلام مهندس
اگه مشکلتون همچنان پا برجاست لطفا دوباره بهم پیام بدید. تشکر
Sami
لطفا پاسخ سوال من را بدهید
مدیر سایت
@Sami,
عذرخواهی بابت تاخیر…
پیام
با سلام. چرا فایل وورد گرونتره؟ مطالب گفته شده توی فایل وورد بیشتر از فایل پی دی اف هستش؟
با تشکر
مدیر سایت
@پیام,
سلام
خیر. صرفا چون فایل خام در اختیار شما قرار میگیره گرونتره.
سپاسگزارم
Sami
با سلام و تشکر بابت مطالب مفیدی که در اختیار دانشجویان قرار می دهید. من جزوات و فیلم های متعددی در خصوص کنترل مقاوم از سایت شما تهیه و در پایان نامه خود استفاده کرده ام.
پس از طراحی SMC از طریق مطالب شما سوال زیر از سوی داور کار مطرح شد:
چون سیستم شما غیر می نیمم فاز است نمی توانید از روش معمول smc استفاده نمایید.
لطفا در این خصوص راهنمایی فرمایید.
مدیر سایت
@Sami,
سلام
درسته.
Sami
@مدیر سایت, چی درسته؟
روش شما یا حرف داور من؟?
مدیر سایت
@Sami,
سلام
منظورم اینه که باید بعد از طراحی حتما بررسی کنید ببینید سیستم مینیمم فاز هست یا خیر. سیستمتون چیه؟
Sami
@مدیر سایت,
سیستم مبدل dc به dc بوست هست.
مرتضی بیات
با سلام.
بعد از اتمام خرید، فایل سریعا به ایمیل وارد شده، ارسال میشه؟ اگه اینطوریه کد پستی و ادرس پستی دیگه لازم نیست!
مدیر سایت
@مرتضی بیات,
سلام
بله سریعا ایمیل میشه. کد پستی هم وارد کردنش الزامی نداره. منتها در بعضی از آموزشها حجم فایلها اینقدر زیاده که یک گزینه خرید پستی هم براشون قرار دادیم و این به خاطر اونه!
تشکر
فرزانه باقری
با عرض سلام و خسته نباشید
چرا در فرمول انرژی کنترلی معادل بخش اغتشاش رو حذف کردین؟؟؟اون هم بخشی از اس دات هست که وقتی با صفر مساوی قرار میدیم باید در فرمول باشه
ممنون میشم اگه سریع پاسخ بدین
بازم ممنون
مدیر سایت
@فرزانه باقری,
سلام
توضیحات کامل به شما به صورت آنلاین ارائه شد
آریا
من جلسه سوم و چهارم طراحی کنترل مود لغزشی رو دیدم و واقعا لذت بردم. فقط ای کاش چند مثال طراحی برای حالت هایی که معادلات حالت داریم و نامعینی که قراره مسیری را ردیابی کنیم قرار بگیرد مثل تمرینات و مثال های خلیل.
مدیر سایت
@آریا,
سلام
این جلسات توی پست مربوط به “آموزش مد لغزشی بر اساس کتاب اسلوتین” گفته شده . و مثالهایی برای ردیابی هم ذکر شده
درود
hanas
@مدیر سایت, بله اما مثالی برای سوپر توییستینگ نداره
اگه مثال هم قرار بدید لطف بزرگی می کنید
مدیر سایت
@hanas,
سلام مجدد
چشم
آریا
سلام خیلی خوب می شد اگه جزوه ای بود که مثلا تمرین طراحی کنترل مود لغزشی در واقع تمرین ۲ فصل ۷ کتاب اسلوتین یا تمرینات طراحی کنترل مود لغزشی هم برای stabilization و هم برای tracking خلیل را کاور می کرد.
مدیر سایت
@آریا,
سلام
من فکر کنم اون مجموعه آموزش مد لغزشی براساس کتاب اسلوتین تقریبا کامله. اما قبول دارم که میشه پایدارسازی رو هم جداگانه بحث کرد. اما اگه به مقالات نگاه کنید میبیند نود درصد در ارتباط با ردیابیه. و ما اینجا کلا در این مورد بحث کردیم. اگه عمری باقی موند سعی دارم ده تا مثال جوندار رو در جلساتی طراحی و شبیه سازی کنم. انشاالله..
درود
آریا
@مدیر سایت, خیلی ممنون. کار ارزشمندی انجام میدید خدا بهتون سلامتی و زندگی با برکت بده.
مدیر سایت
@آریا,
سلام
ممنون ازین همه لطفی که به ما دارید
سپاسگزارم
عماد
کنترل کننده آبشاری چه نوع کنترل کننده ای است؟و در کدام دسته بندی رویکرد کنترلی جای دارد؟
مدیر سایت
@عماد,
سلام
قبلا یه مقاله خوندم در این زمینه. ولی یادم نیست!!
عماد
سلام خسته نباشید
می خواستم یک دسته بندی از روش های کنترلی در حوزه کنترل مقاوم بدونم
مدیر سایت
@عماد,
سلام
کنترل مد لغزشی
کنترل H-inf
کنترل گام به عقب
کنترل کننده های مقاوم هوشمند